کد پروژه: 2998
عنوان پروژه: فروش پروژه تخمین شرایط اولیه پرتابه با تلفیق اطلاعات ناوبری لخت و رادیویی با نرم افزار MATLAB
قالب بندی: m – داکیومنت کامل
دسته: کامپیوتر – MATLAB
قیمت: 80.000 تومان
قابلیت اجرا در نرم افزار: MATLAB
شرح مختصر:
فروش پروژه تخمین شرایط اولیه پرتابه با تلفیق اطلاعات ناوبری لخت و رادیویی با نرم افزار MATLAB
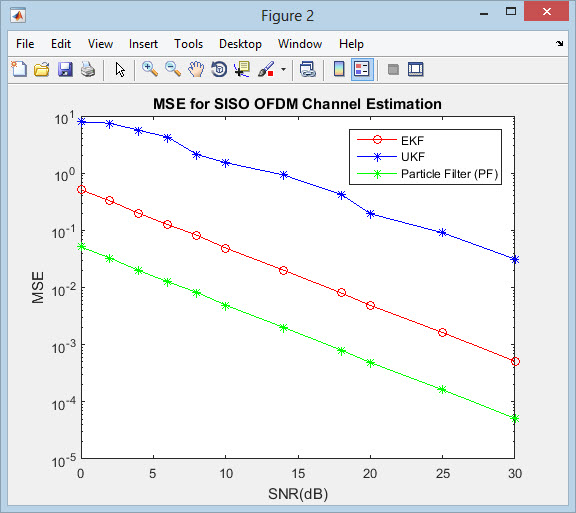
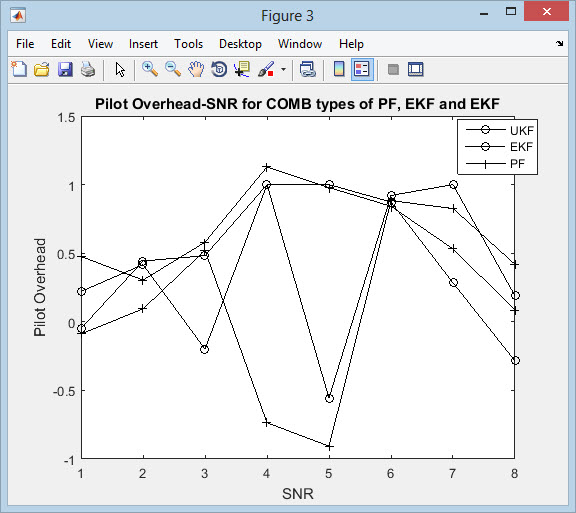
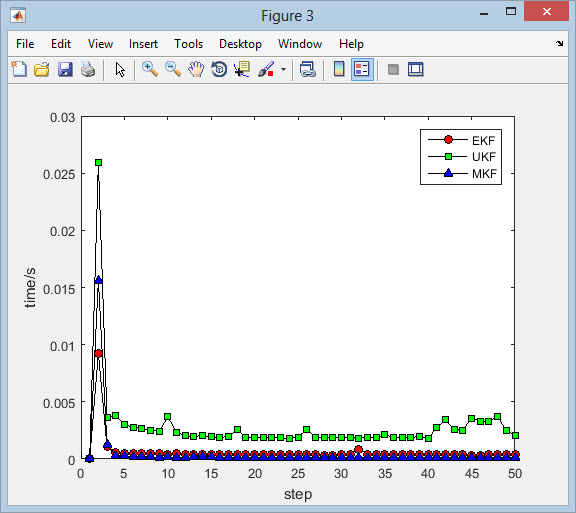
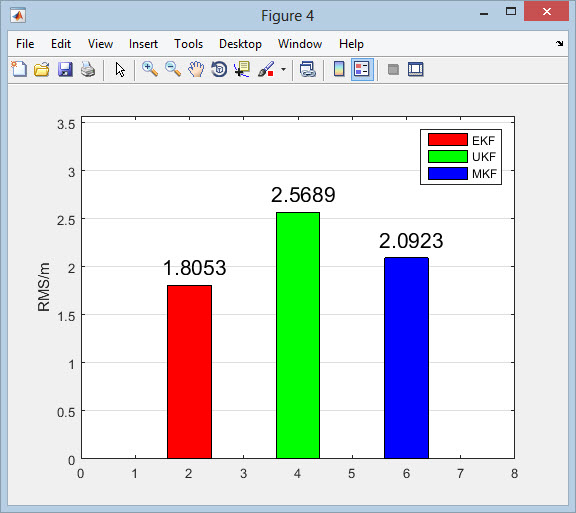
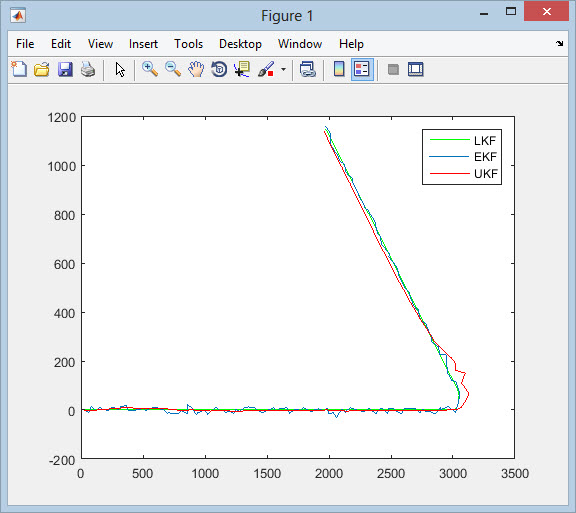
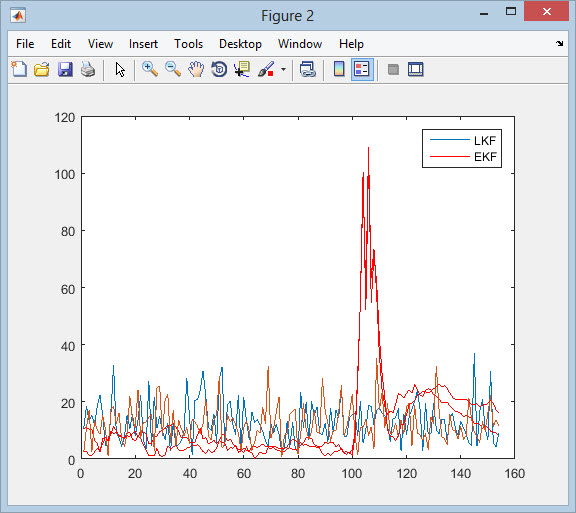
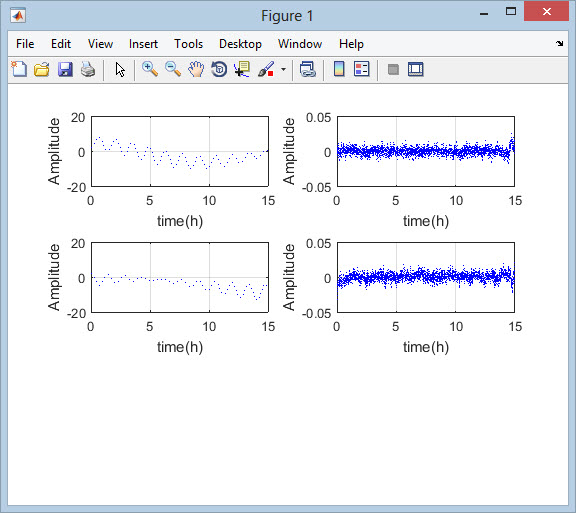
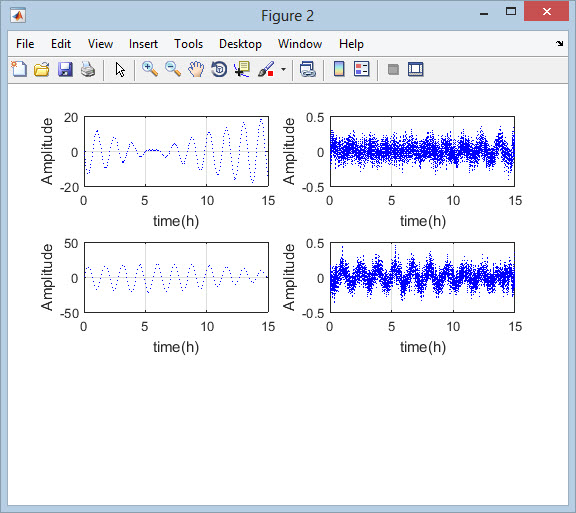
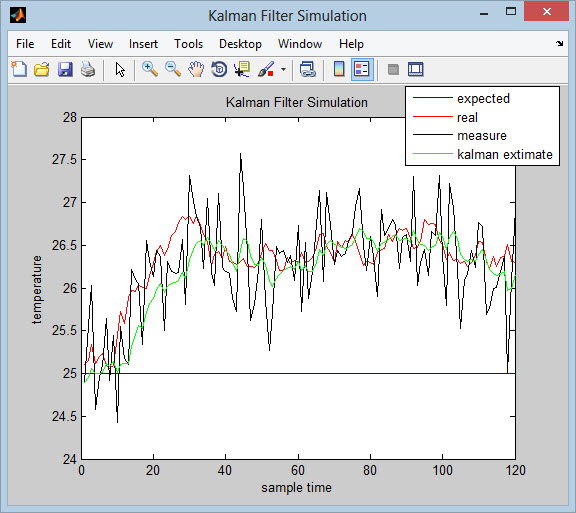
هدف از ارایه این تحقیق، بهبود الگوریتم هم راستاسازی و تعیین دقیق موقعیت، وضعیت و سرعت اولیه یک سامانه ناوبری لخت تلفیقی شامل سه شتاب سنج، سه ژیروسکوپ و سامانه کمک ناوبری رادیویی لورن نسبت به دستگاه مرجع جغرافیایی می باشد. در گام نخست هم راستاسازی بر اساس تلفیق غیرخطی سامانه ناوبری لخت با سامانه های کمک ناوبری با استفاده از فیلتر کالمن خنثی و مقایسه آن با روش های قبلی انجام شد. از آن جا که مبنای الگوریتم ناوبری یکپارچه تخمین خطا (حالت) است، دقت تخمین حالت فیلتر کالمن خنثی و فیلترهای پیشین مورد بررسی قرار گرفت. فیلتر کالمن خنثی مبتنی بر نمونه گیری است و نیازی به محاسبه مشتق ندارد. همچنین این فیلترها در فرآیندهای غیر خطی/ غیرگوسی بر اساس تئوری فیلتر بیزی، با استفاده از وزنهای تصادفی، تخمینی از انتگرال بیز را به دست می دهد. بنابراین فیلتر خنثی هیچ محدودیتی بر روی تابع چگالی احتمال خود ندارد و دارای دقت عددی بیشتری نسبت به دیگر فیلترها است. این موضوع در نتایج شبیه سازی ها نیز نمود یافت و مشاهده گردید که فیلتر خنثی نتایج بهتری در مقایسه با فیلتر توسعه یافته در شبیه سازی ها ارائه داده است. لیکن فیلتر خنثی را می تواند به عنوان جایگزین مناسبی برای فیلترهای پیشین در بحث هم راستاسازی سامانه ناوبری لخت مورد استفاده قرار داد.
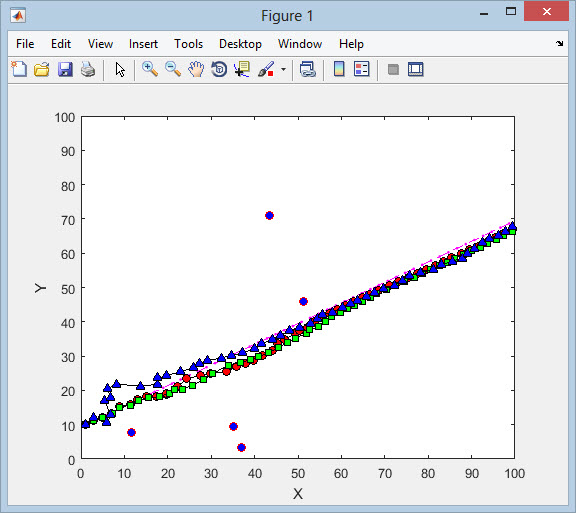
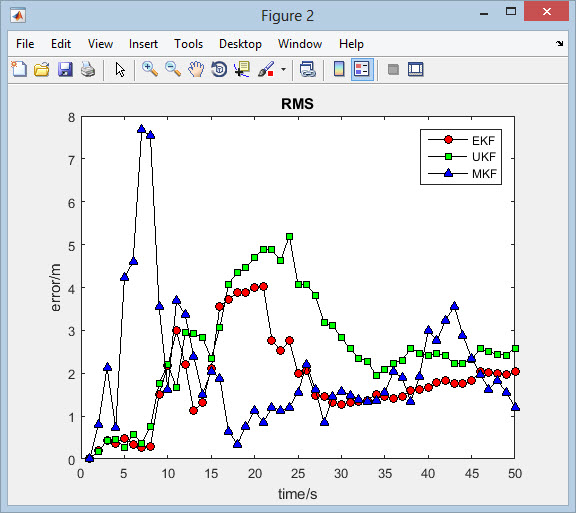
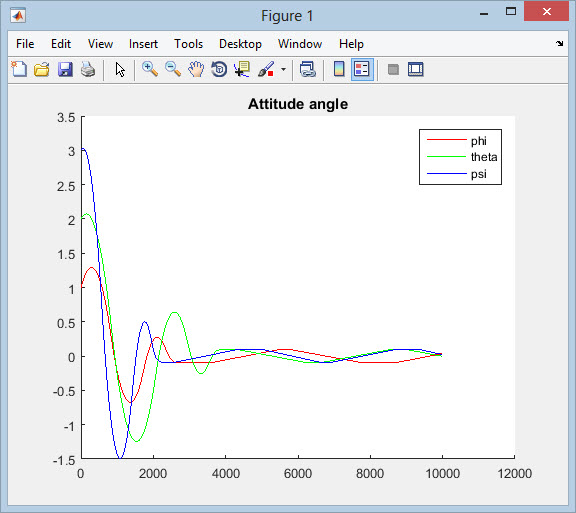
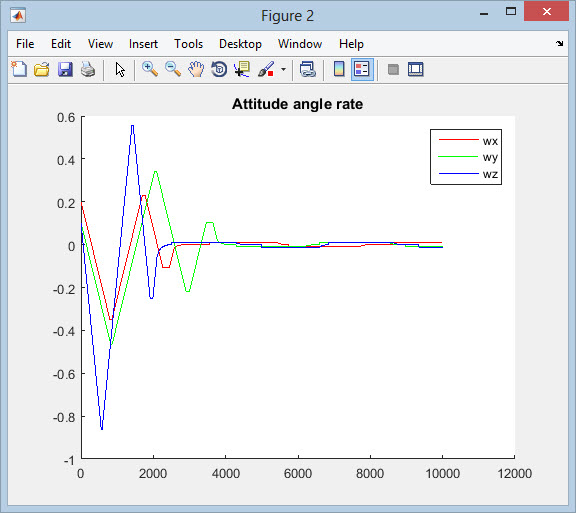
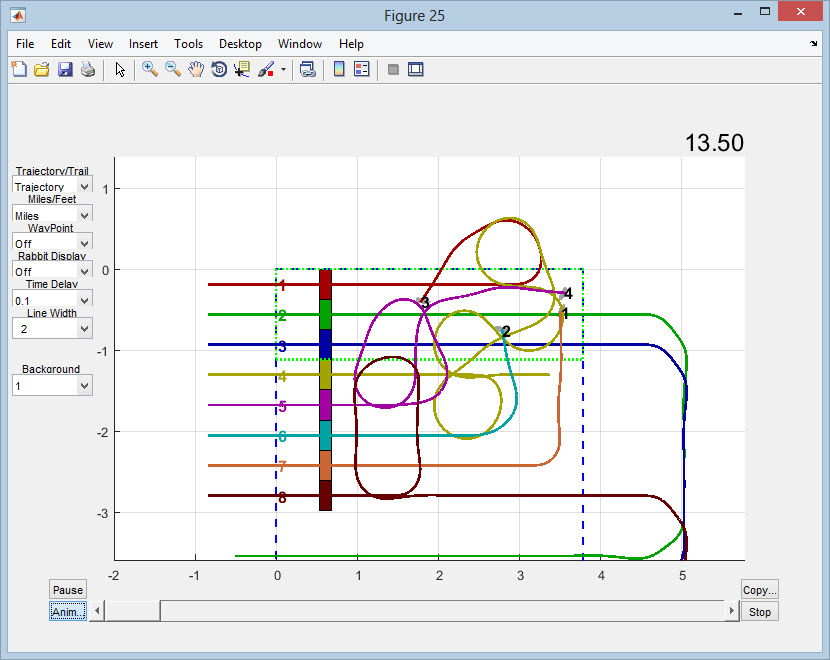
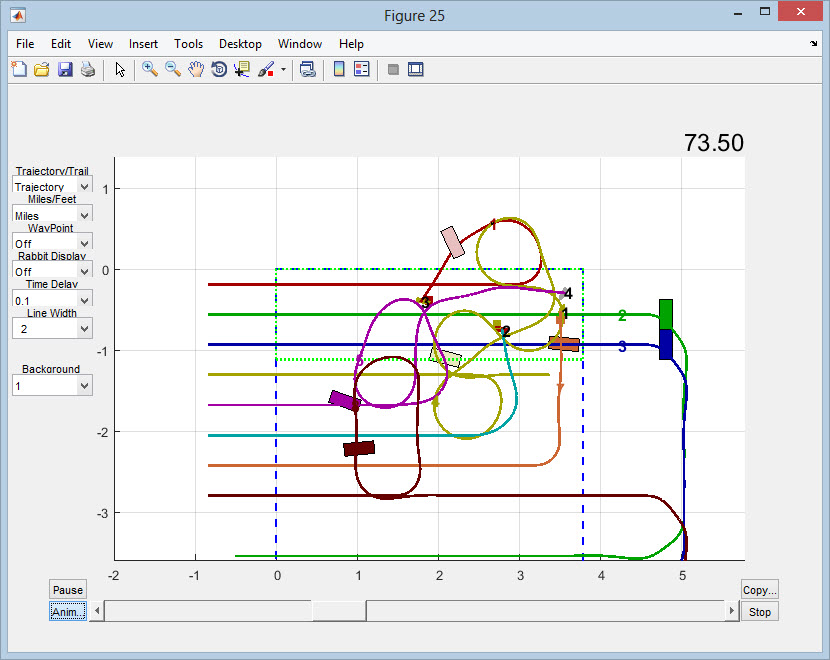
در مرحله بعد برای درک بهتر از پایداری و همگرایی این الگوریتم های مبتنی بر فیلترهای مذکور، صحت عملکرد آن ها بر روی یک پرتابه در دو حالت سکون و حرکت شبیه سازی شده، ارزیابی شد. ارزیابی عملکرد یک سامانه ناوبری لخت در عمل به دلیل بالا بودن قیمت تجهیزات ناوبری از قبیل حسگر واحد اندازهگیری لخت پُرهزینه است، بنابراین روشی که در این پروژه به منظور شبیه سازی چندین مسیر فرضی به کار گرفته شد، علاوه برکارآیی بالا، در کاهش هزینه ها بسیار موثر بوده است. زیرا در این رویکرد نیاز به خرید تجهیزات نیست. نتایج شبیه سازی نیز این امر را تایید میکند و این مهم به سریع تر و دقیق تر شدن تست سامانه های ناوبری لخت کمک می کند. ایده اصلی در الگوریتم هم راستاسازی ناوبری تلفیقی در این جا استفاده از یک تخمینگر غیرخطی با توجه به ذات غیر خطی فرآیند بود. در این صورت نیازی به خطیسازی معادلات سامانه نیست و در نتیجه از خطاهای ناشی از خطی سازی اجتناب خواهد شد. نتایج شبیه سازی برتری الگوریتم پیشنهادی را نسبت به الگوریتم های پیشین تایید میکند.
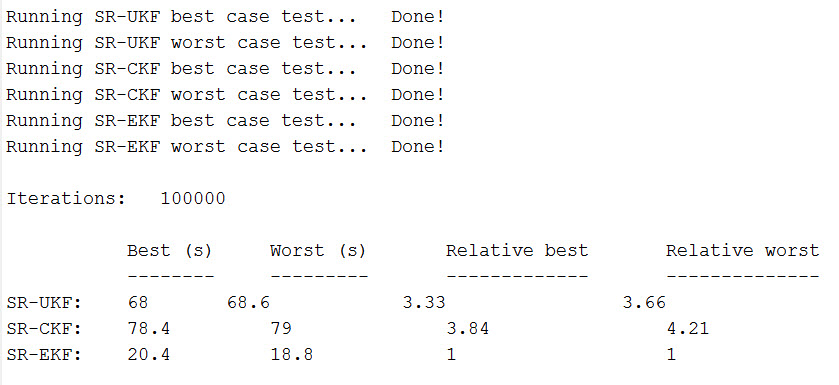
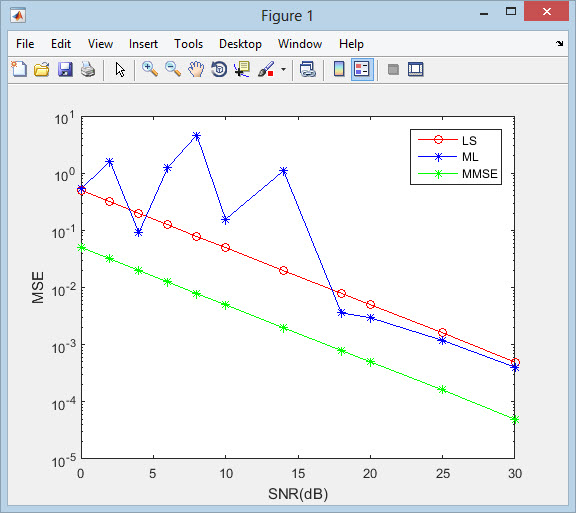
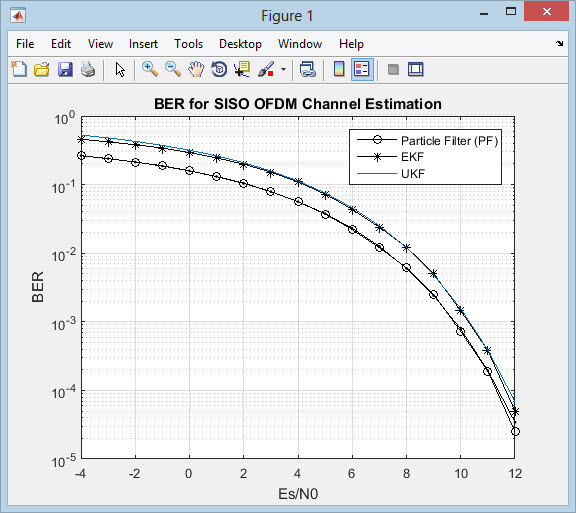
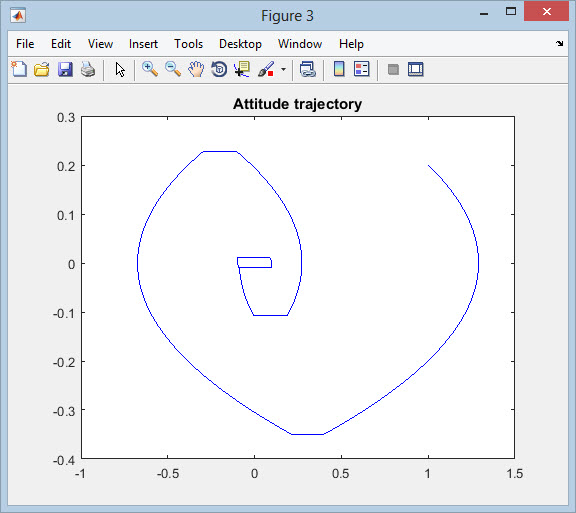
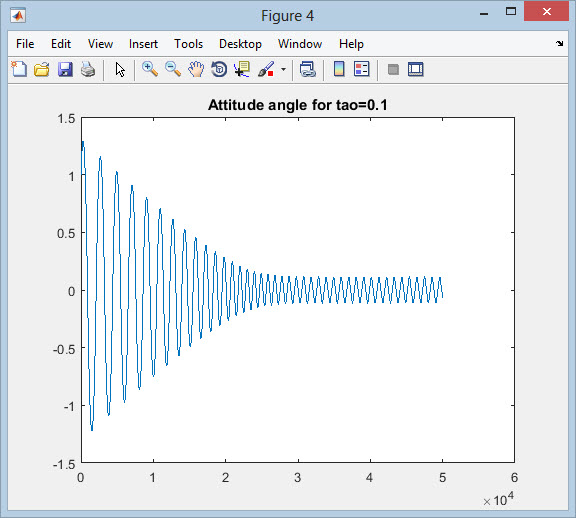
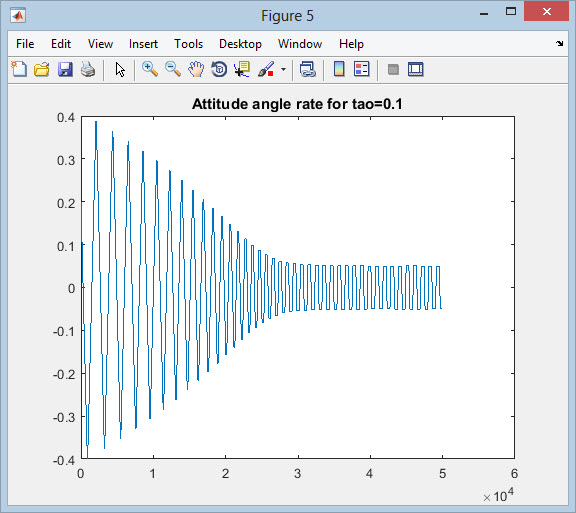
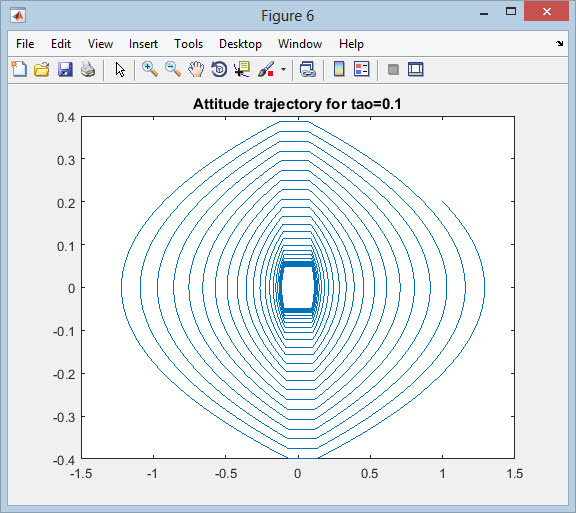
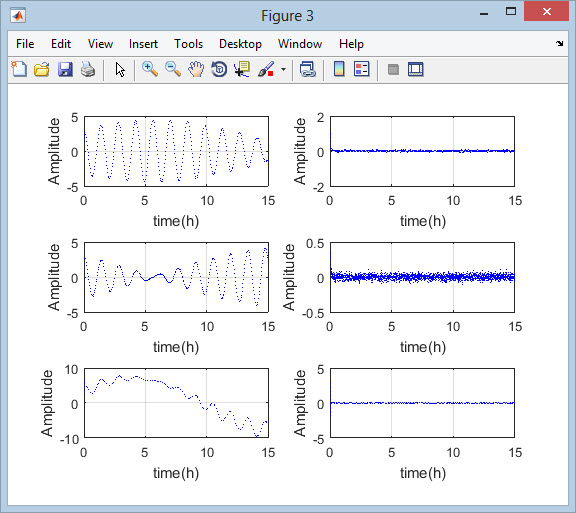
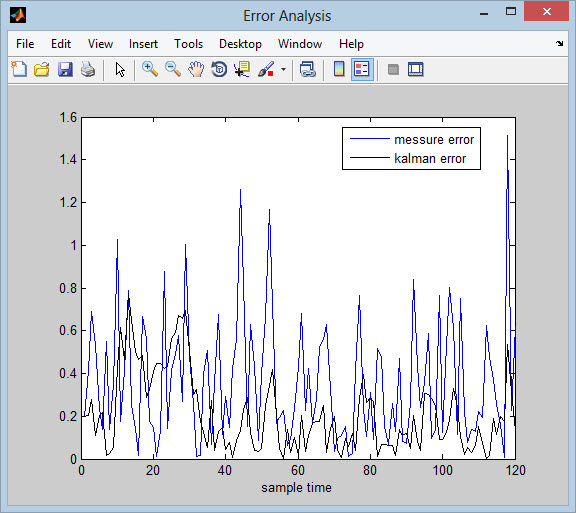
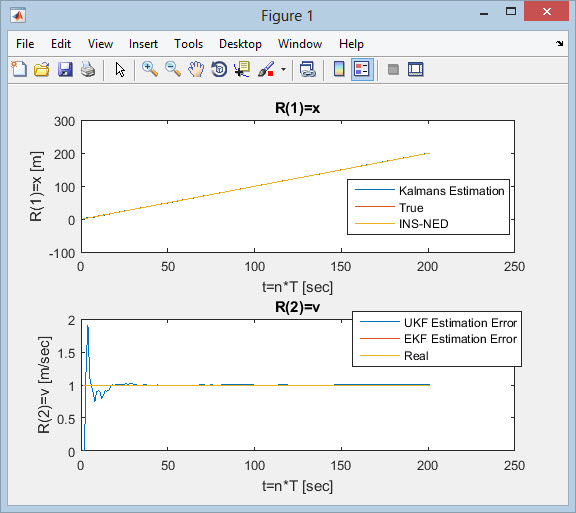
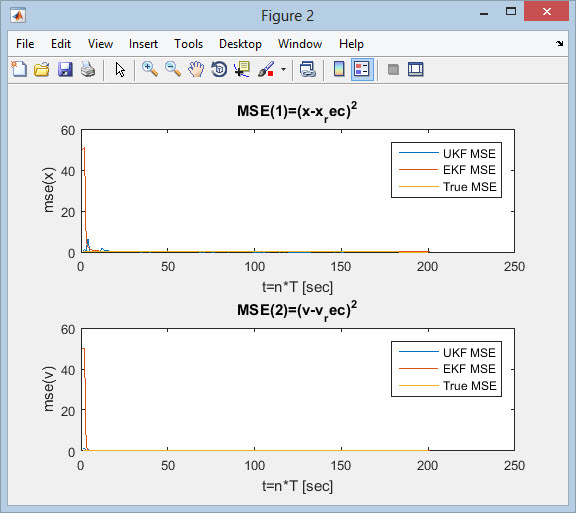
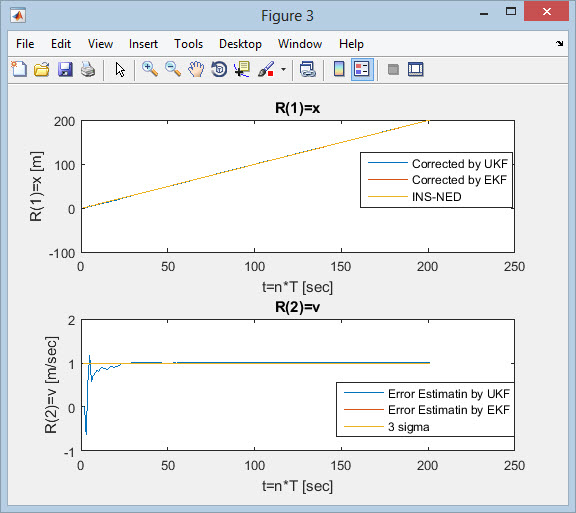
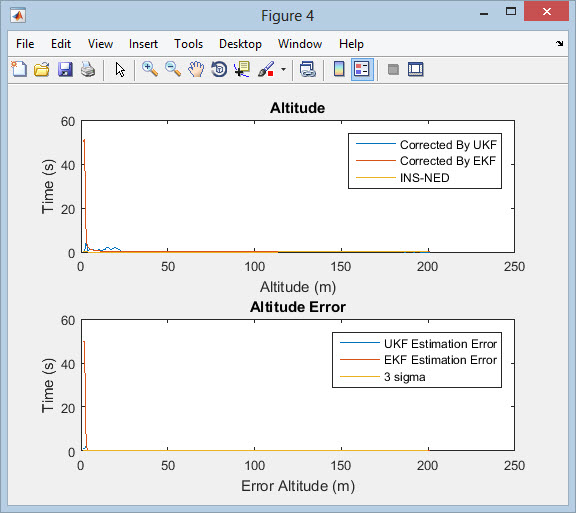
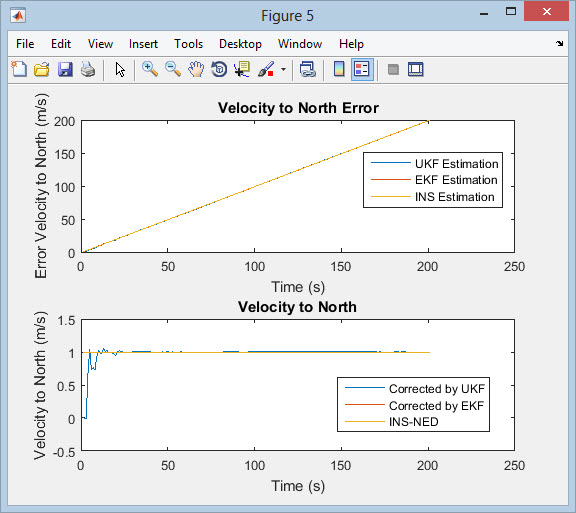
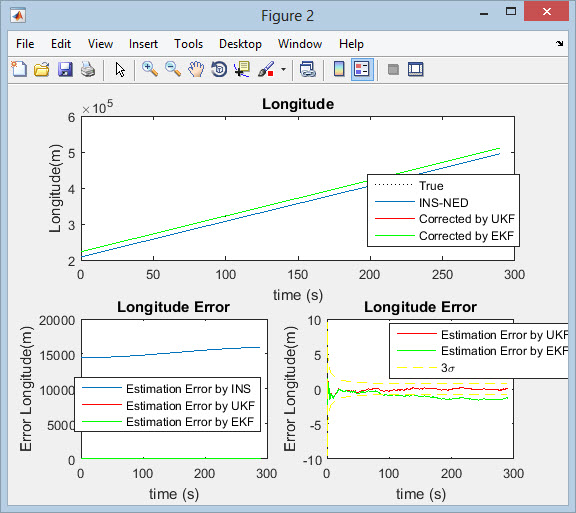
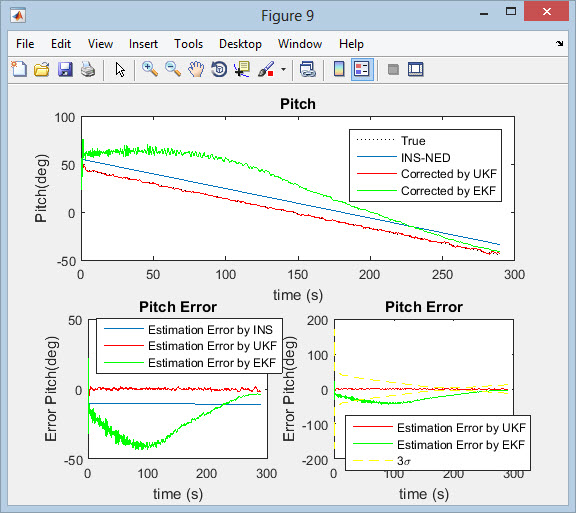
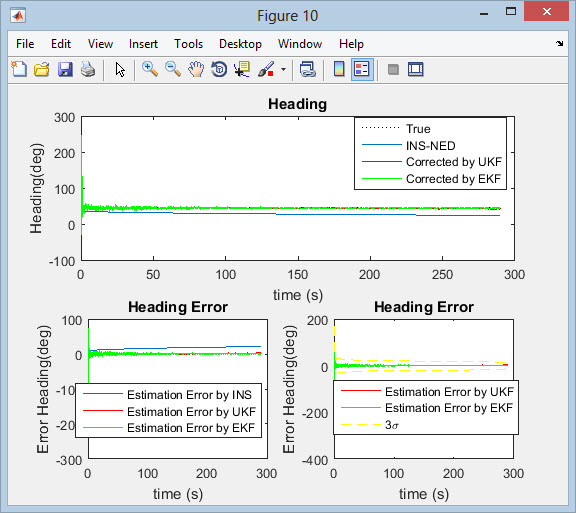
عكس خروجی برنامه
عکس 1
عکس 2
عکس 3
عکس 4
عکس 5
عکس 6
عکس 7
عکس 8
برای خرید این پروژه با شماره 09360703858
یا آدرس ایمیل nn4e@aol.com در تماس باشید.