فروش پروژه بهینه سازی کنترل تطبیقی فعال سازه های مرتفع به صورت مقاوم مبتنی بر رویکرد ترکیبی Q-PDC-LMI با نرم افزار MATLAB
کد پروژه: 2974
عنوان پروژه: فروش پروژه بهینه سازی کنترل تطبیقی فعال سازه های مرتفع به صورت مقاوم مبتنی بر رویکرد ترکیبی Q-PDC-LMI با نرم افزار MATLAB
قالب بندی: m
دسته: کامپیوتر – MATLAB / عمران – MATLAB
قیمت: 100.000 تومان
قابلیت اجرا در نرم افزار: MATLAB
شرح مختصر:
فروش پروژه بهینه سازی کنترل تطبیقی فعال سازه های مرتفع به صورت مقاوم مبتنی بر رویکرد ترکیبی Q-PDC-LMI با نرم افزار MATLAB
وقوع زلزله هاي اخير در ايران و ديگر مناطق جهان كه سبب خرابي و كشته شدن انسان هاي بي شماري شده است، مبين عدم كفايت ساختمان ها در تحمل نيروهاي مخرب زلزله مي باشد. لذا در دهه اخير، موسسات مختلف در كشورهاي زلزله خيز، مبادرت به تهيه دستورالعمل هاي خاص آن كشور بر اساس ملاحظات اقتصادي، اجتماعي و فني خود نموده اند. وقوع زلزله در مناطق شهری و روستايي، به دليل عدم استحكام بناهاي موجود كه اكثرا فاقد سيستم سازه اي مقاوم در برابر زلزله هستند، همواره با خسارت هاي جبران ناپذير جاني همراه بوده است. كارايي يك ساختمان در مقابل حركات زلزله، تابع نحوه اتصال اعضای سازه اي و نيز سختي و انعطاف پذيري آن ها مي باشد. بنابراين جزئيات تعمير و تقويت در دو قسمت تقويت اعضای سازه اي ساختمان هاي بنايي و بهبود يكپارچگي سازه اي ساختمان هاي بنايي جداگانه طبقه بندي مي شود. در تقويت اعضای سازه اي، مي توان به مواردي از قبيل تقويت كلاف هاي افقي و عمودي، يا افزايش مقاومت جانبي ديوارهاي بنايي اشاره نمود.
در صورت عدم امكان تقويت اعضا در سازه هايي با اسكلت سازه اي، مي توان با كاربرد ميراگرهاي انرژي، از استهلاك انرژي در خود اعضای سازه و آسيب رسيدن به آن ها جلوگيري كرد. در بحث بهبود يكپارچگي سازه اي نيز مي توان با افزايش يكپارچگي، در حفظ كليت سازه اي و پايداري آن اقدام نمود. از جمله مي توان به بستن كف ها و ديوارها به همديگر توسط كلاف هايي در نقاط مختلف سازه اشاره نمود. در حال حاضر ساختمان هاي ساخته شده با مصالح بنایی (به خصوص ساختمان هاي آجري) درصد بالایی از ساختمان هاي موجود یا در حال احداث در کشور ی مانند ایران را تشکیل می دهد. علیرغم تعداد و وسعت ساختمان هاي بنایی در کشور و علم به این مسئله که بیشترین خسارت در زلزله هاي متوسط و نسبتا شدید مربوط به این ساختمان ها است، اما متاسفانه در کشور، کارهاي تحقیقاتی زیادي در این زمینه انجام نشده است. از طرف دیگر مسئولین امر، تاکنون به طور جدي پیگر این بحث یعنی مقاوم سازي سازه هاي بنایی نبوده اند. لذا استفاده از فولاد در ساختمان ها، علاوه بر معایبی که دارد، مزایایی هم خواهد داشت. دیوارهاي بنایی به دو دسته سازه اي و غیرسازه اي تقسیم میشوند. دیوارهاي سازه اي به دیوارهایی اطلاق می شود که بارهاي ثقلی و جانبی را در امتداد و عمود بر صفحه خود تحمل میکنند. این دیوارها از واحدهاي بنایی شامل آجر و بلوك سیمانی همراه باملات ماسه سیمان، باتارد و ماسه آهک تشکیل شده اند. دیوارهاي بنایی غیرسازه اي یا تیغه ها، دیوارهایی هستند که هیچ گونه سهمی از بارهاي ثقلی و لرزه اي ساختمان به آن ها نسبت داده نمی شود و به عنوان اجزاي غیرسازه اي تلقی و باید براي ضوابط مربوطه کنترل گردند.
در صورت عدم امكان تقويت اعضا در سازه هايي با اسكلت سازه اي، مي توان با كاربرد ميراگرهاي انرژي، از استهلاك انرژي در خود اعضای سازه و آسيب رسيدن به آن ها جلوگيري كرد. در بحث بهبود يكپارچگي سازهاي نيز ميتوان با افزايش يكپارچگي، در حفظ كليت سازهاي و پايداري آن اقدام نمود. از جمله مي توان به بستن كف ها و ديوارها به همديگر توسط كلاف هايي در نقاط مختلف سازه اشاره نمود. به صورت کلی می توان با جمع آوري روش هاي نوين و در عين حال كاربردي مورد استفاده در كشورهاي پيشرفته دنيا در مقاوم سازي سازه هاي خشتي، سنگي و آجري، راهکارهای مختلفی از جمله كاربرد ميراگرهاي XADAS غيرفعال در انواع سازه هاي بنايي به عنوان افزاينده ميرايي و سختي و مطالعه ميزان تاثير آن در كاهش شاخص هاي كارايي سازه اي از جمله تغيير مكان هاي نسبي بين طبقات در ساختمان های مرتبغ، زمينه كارهاي علمي جهت تحقيقات و تدوين مباني جامع جهت مقاوم سازي بناهاي موجود در ايران در آينده فراهم آورده شود.
در مواردي كه سازه بنايي موجود داراي كلاف هاي افقي و عمودي باشد، ولي از نظر سازه اي براي مقابله با نيروهاي جانبي ضعيف تشخيص داده شود، مي توان با به كار بردن تكنيك هاي جديد، مقاومت اين گونه سازه ها را بهبود بخشيد. يكي از روش هاي مقاوم سازي سازه هاي بنايي كلاف دار، استفاده از ميراگرهايي مي باشد كه در افزايش سختي جانبي و ميرايي اين سازه ها كاربرد دارند. به كارگيري اين گونه ميراگرها كه با نام ADAS مشهور هستند، اثرات بسيار مفيدي در تقويت انواع سازه ها دارند. ميراگرهاي XADAS كه نوع خاصي از ميراگرهاي ADAS مي باشند، متشكل از صفحات فولادي موازي ضربدري X) شكل( مي باشند كه با استفاده از خاصيت تغييرشكل پلاستيك فولاد در جذب انرژي ورودي به سازه و اتلاف آن كارايي دارند. اين ميراگرها همچنين به همراه مهاربندي هاي جناقي نگهدارنده آن ها در افزايش سختي جانبي سازه نقش به سزايي ايفا مي كنند. اين ميراگرها كه از پایين توسط مهاربندي هاي جناقي به زمين يا طبقه پایين محكم شده و از بالا به كلاف افقي طبقه وصل مي شوند، با حركت جانبي طبقه مورد نظر و ايجاد تغيير شكل غيرالاستيك، باعث جذب و اتلاف انرژي وارده از طرف زمين لرزه به سازه شده و نهايتا از ورود انرژي به اعضاي اصلي سازه جلوگيري مي نمايند. با نصب اين ميراگرها مي توان كاهش چشمگيري در شاخص هاي مهم كارايي ساختمان از قبيل جابجايي طبقات، تغييرمكان نسبي طبقات و برش طبقات ايجاد نمود. اما یک جنبه مهم در طراحی سازه های مهندسی عمران، کاهش مقادیر پاسخ مانند سرعت، انحراف و نیروهایی است که ناشی از بارهای پویای محیطی (یعنی باد و زلزله) ایجاد می شود. روش های کنترلی، ساختاری جدید برای این منظور هستند که می توانند به عنوان روش کنترل فعال، نیمه فعال، منفعل و غیرفعال طبقه بندی شوند. در سه دهه اخیر، کاهش پاسخ ساختاری ناشی از اثرات پویا، تبدیل به موضوع تحقیقاتی شده است و بسیاری از مفاهیم کنترل ساختاری در عمل پیاده سازی شده اند. دمپرهای جرمی تنظیم شده یا TDM قدیمی ترین دستگاه های کنترل لرزش ساختاری موجود هستند. مفهوم کنترل لرزش با استفاده از یک دمپر جرم به سال 1909 باز می گردد، زمانی که Frahm یک دستگاه کنترل لرزش به نام جاذب ارتعاش پویا را اختراع کرد. سیستم های مانع جرمی فعال تنظیم شده یا ATMD نیز در دهه های اخیر به عنوان یک زمینه محبوب تحقیقاتی بوده است و پیشرفت قابل توجهی در این زمینه در طی این سال ها انجام شده است. این سیستم به عنوان قسمتی از تحقیقات شناخته شده است که در آن حرکت یک ساختار با استفاده از عملکرد یک سیستم کنترل از طریق برخی از منبع انرژی خارجی کنترل یا اصلاح می شود.
یک سیستم ATMD به طور موثری پاسخ ساختاری را کاهش می دهد، اما نیروهای کنترل خارجی لازم در مورد ساختمان های عظیم و بزرگ می توانند بسیار بزرگ باشند. از طرف دیگر، این سیستم ها در هنگام تحریک زلزله به یک منبع تغذیه مداوم و یک سیستم رایانه ای دیجیتال احتیاج دارند که تهیه آن در طول زمین لرزه های شدید ممکن است دشوار باشد. در نتیجه این محدودیت ها، از سیستم های کنترل فعال در عمل به اندازه سیستم های منفعل استفاده نمی شود. اگرچه کنترل منفعل به طور گسترده ای در عمل مورد استفاده قرار می گیرد، در گذشته به دلیل دستیابی به کنترل بالاتر پاسخ، تحقیقات گسترده ای در زمینه کنترل فعال سازه ها انجام شده است. علاوه بر این، الگوریتم های کنترل توسعه یافته برای کنترل فعال، مستقیما برای توسعه سایر استراتژی های کنترل ضعف مانند کنترل نیمه فعال مفید بوده اند. بنابراین، با وجود برخی از مشکلات بارز اجرای استراتژی کنترل فعال برای کاربردهای زلزله، تحقیقات در زمینه کنترل ساختاری فعال همچنان ادامه دارد.
سنتز نظارت بر سلامت ساختاری با کنترل ارتعاش مقرون به صرفه و برای توسعه ساختارهای هوشمند سودمند است. یائو برای اولین بار به طور رسمی کاربرد تئوری کنترل را برای کنترل ساختاری فعال معرفی کرد. در این سیستم، نیروی کنترل به صورت بیرونی بر روی سازه اعمال می شود تا پاسخ آن کاهش یابد. انواع مختلفی از مکانیزم های کنترل فعال به طور گسترده در ادبیات این زمینه گزارش شده است. ساختمان کیوباشی سیوا، اولین اجرای کامل فناوری کنترل فعال است که به صورت یک ساختمان 11 طبقه با مساحت 423 متر مربع است. سیستم کنترل این ساختمان از دو دستگاه ATMD تشکیل شده است که ATMD اولیه برای حرکت عرضی استفاده می شود و دارای وزن 4 تن است، در حالی که ATMD ثانویه دارای وزن 1 تن است و برای کاهش حرکت چرخشی استفاده می شود.
الگوریتم های مختلف کنترل کلاسیک و مقاوم برای کاهش پاسخ های ساختمان بلند اخیر پیشنهاد شده اند. رایج ترین این روش های کنترلی شاملLQR ، LQG، کنترل کننده قطع شده، کنترل کننده بنگ بنگ، کنترل کننده H بی نهایت، کنترل کننده حالت کشویی یا لغزشی، کنترل کننده انتساب قطب، کنترل فضای مدل مستقل یا IMSC است. برای این که بتوان به ساختارهای کانالی در کنترل دسترسی داشت، اخیرا از منطق فازی با هدف بهینه سازی کنترل فعال در سازه های مهندسی عمران به وفور استفاده می شود. منطق فازی در چنین کاربردی، دارای یک سری مزایا است که می توان به موارد ذیل اشاره نمود:
- منطق فازی از معدود رویکردهای مدل آزاد ریاضی برای شناسایی و کنترل سیستم است که باعث می شود سیستم ساده تر از طراحی یک مدل ریاضی دقیق از سیستم ساختاری مورد نیاز برای طراحی سیستم کنترل استفاده کند. این امر می تواند با استفاده از تجربه و تخصص انسانی برای اجرای کنترل کننده فازی انجام شود.
- منطق فازی می تواند عدم قطعیت داده های ورودی از تحریکات باد یا زلزله و حسگر لرزش ساختاری را تحمل کند، در نتیجه منجر به یک سیستم کنترل کننده با استحکام ذاتی کافی می شود.
- کنترل کننده فازی، توانایی کنترل رفتار غیرخطی سازه ناشی از جابجایی های بزرگ یا غیرخطی بودن و آسیب دیدن اجزا را دارد که ساختار این تحقیق نیز به صورت غیرخطی در نظر گرفته خواهد شد.
- کنترل کننده فازی با اصلاح قوانین یا عملکردهای عضویت و استفاده از تکنیک های یادگیری می تواند سازگار باشد.
بیشتر روش های طراحی کنترل براساس تکنیک بهینه سازی حداکثر عملکرد سیستم از طریق به حداقل رساندن انرژی کنترل تحت محدودیت های خاص یا به حداقل رساندن مقادیر پاسخ سازه ها انجام می شود. روش بهینه سازی را می توان به طور خلاصه به عنوان تنظیم پارامترهای سیستم کنترل کننده توصیف کرد. اکثر روش های بهینه سازی مورد استفاده در طراحی کنترل روش های جستجوی مبتنی بر شیب سنتی هستند. برخلاف روش بهینه سازی سنتی، الگوریتم های ژنتیک به طور موثر یک راه حل بهینه از فضای راه حل پیچیده و احتمالا ناپیوسته پیدا می کنند. الگوریتم های ژنتیکی به عنوان تکنیک های جستجوی موثر در بسیاری از زمینه های مسائل بهینه سازی استفاده شده است. این روش برای به دست آوردن کنترل کننده ای بهینه، موفقیت هایی را در سال های اخیر به دست آمده است که از حمله مهمترین این بهینه سازی ها می توان به کاهش ترتیب کنترل کننده بازخورد، تنظیم وزن کنترل کننده های عصبی و تنظیم و بهبود پارامترهای کنترل کننده فازی اشاره نمود ]20[. اما الگوریتم های خانواده تکاملی، دارای یک سری ضعف ها هستند که می توان به تصادفی بودن آن ها در بهینه سازی اشاره نمود. البته سرعت اجرا و همگرایی سریع آن ها، در مسائل بسیاری مشاهده شده است، اما برای تبدیل مسائل خطی به غیرخطی، به عنوان یک روش نامناسب هستند، زیرا ممکن است به دلیل عدم تنظیم صحیح عملگرهایی هم چون جمعیت اولیه، جهش، ترکیب، انتخاب و تابع برازش، در بهینه محلی به دام بیفتند. به همین دلیل، یافتن یک روش آموزش دهنده که قابلیت کنترل و بهینه سازی مقاوم را نیز داشته باشد، امری ضروری است که در این بین، این تحقیق به رویکرد یادگیری تقویتی می پردازد که از تکنیک Q-Learning استفاده خواهد شد.
در کنترل فعال سازه های مرتفع به صورت بهینه و مقاوم، مسئله همزمان بودن و همین طور آنلاین بودن یک مسئله مهم است تا بتوان به صورت بلادرنگ، کنترل سازه را در مسائل مختلف در نظر گرفت. از سویی دیگر، در این تحقیق سازه به صورت غیرخطی در نظر گرفته می شود. لذا به استناد به این موارد، نیاز به یک ساختار از کنترل کننده به صورت تطبیقی وجود دارد. کنترل کننده تطبیقی، کنترل کننده ای است با پارامترهای قابل تنظیم همراه با مکانیزمی برای تنظیم پارامترها در راستای اهداف کنترل که چنین کنترل کننده ای به دلیل وجود مکانیزم تنظیم، غیرخطی است، لیکن دارای ساختار ویژه ای است. در چنین کنترل کننده ای بايد معادلات حاكم بر سيستم را شناسايي كرد و سپس براي مدل به دست آمده ،کنترل کننده مناسبی طراحي نمود. در این صورت در مقابل تغييرات مدل کنترل کننده، تغييراتي خواهد داشت تا عملكرد سيستم حلقه بسته بهبود يابد. به اين دليل آن را کنترل تطبیقی مي گويند. دلیل اولیه مطرح شدن کنترل تطبیقی، رسیدن به کنترل کننده هایی بود که بتوانند با تغییر دینامیک های فرآیند و مشخصه های اغتشاش به روز رسانی شوند و در مقابل این تغییرات شرایط، فرمان های کنترل متفاوتی ارسال کنند. این حقیقت ثابت شده است که روش های تطبیقی برای تنظیم خودکار کنترل کننده ها در برابر اغتشاش های داخلی و خارجی، آنلاین بودن، همزمان و بلادرنگ بودن، به صورت به روز شده در هر لحظه قابل استفاده هستند. لذا نیاز به طراحی یک ساختار کنترل کننده مقاوم تطبیقی است که قابلیت های نام برده را دارا باشد. از این رو، به دلیل عدم قطعیت در سیستم های کنترلی غیرخطی، منطق فازی دارای کاربرد بالایی است که بتواند مدل فضای حالت از دنیای عدم قطعیت را به حالت قطعیت، ارائه بدهد. شماتیک فازی برای طراحی قوانین کنترلی بازخورد حالت، نیاز به مدلی دارد که مزیت کنترل کننده در حالت آنلاین از طریق تکنیک تنظیم کننده درجه دوم تعیین شود که به صورت غیرخطی باشد. علاوه بر این، ساختار فازی سیستم با استفاده از ناقل های پایدار و عملکرد در سطح مقیاس به منظور غلبه بر سوئیچینگ ناپیوسته در سیستم کنترل غیرخطی طراحی می شود که از این رو، نیاز به استفاده از یک سیستم استنتاج فازی با شرایط نام برده را دارد. از این رو، مدل منطق فازی برای مشاهده فضای حالت، به صورت فازی نوع دوم خواهد بود. قوانین کنترل به صورت جبران سازی توزیع موازی یا PDC هستند که در اصل کنترل کننده دارای یک ساختار بازخورد پویای غیرخطی است. مشکلات همگام سازی کنترل کننده به عنوان مسئله نابرابری ماتریس خطی یا LMI فرموله شده است. یعنی می توان گفت که پارامترهای کنترل کننده PDC از مجموعه ای از شرایط LMI به دست می آیند و با ساختار فازی نوع دوم، برای تعیین فضای حالت کنترل کننده مدنظر قرار می گیرد و بهینه سازی کنترل کننده با روش Q-Learning انجام می شود.
به صورت کلی، در این تحقیق، ترکیبی از روش Q-Learning و کنترل کننده ترکیبی LMI و PDC مبتنی بر ساختار منطق فازی نوع دوم در ميراگرهاي XADAS برای ساختمان های مرتفع ارائه شده است. به منظور اطمینان از ایمنی ساختاری که اساسا به پاسخ جابجایی ساختمان بستگی دارد، یک کنترل کننده منطق فازی نوع دوم برای ارزیابی نیروی کنترل فعال در یک سیستم کنترل کننده ATMD بر اساس دریافت حداکثر کاهش در پاسخ جابجایی بالای ساختمان طراحی شده است. در طراحی سیستم منطق فازی نوع دوم، بهترین پاسخ جابجایی و سرعت پاسخ ساختمان به عنوان بازخورد سیستم فازی در نظر گرفته می شود. پارامترهای مختلفی در سیستم منطق فازی نوع دوم، بهینه سازی می شوند که به عنوان مثال می توان به نسبت میراییATMD ، نسبت فرکانس، نسبت جرم، پارامترهای همپوشانی در توابع عضویت (پارامترهای ورودی و خروجی) و غیره اشاره نمود که با استفاده از روش Q-Learning، بهینه می شوند تا حداکثر کاهش در پاسخ ساختمان را به دست آورد. برای مطالعه عددی در این تحقیق، یک ساختمان 11 طبقه با یک سری داده های زلزله و تاثیرات بر روی آن، انتخاب شده است که به عنوان یک قاب برشی، مدل سازی می شود و مشکل در فضای حالت حل می شود. ساختار به عنوان یک سیستم غیرخطی در نظر گرفته شده است. همچنین، سیستم کنترلی، یک کنترل کننده ترکیبی LMI و یک کنترل کننده PDC برای کنترل پاسخ ساختمان طراحی شده اند. رویکرد ارائه شده در این تحقیق می تواند برای سیستم های ترکیبی یا سوئیچینگ اعمال شود.
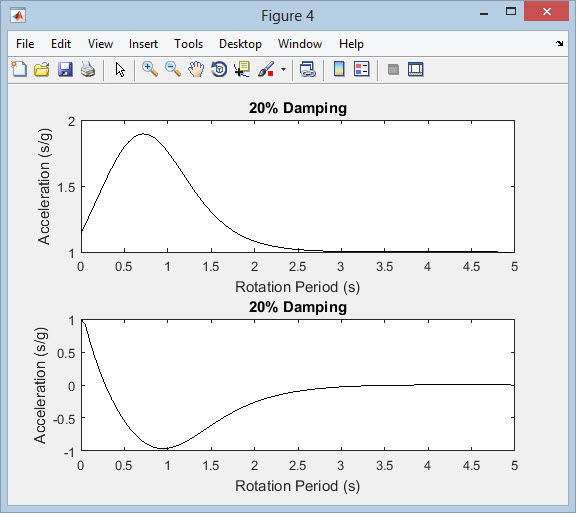
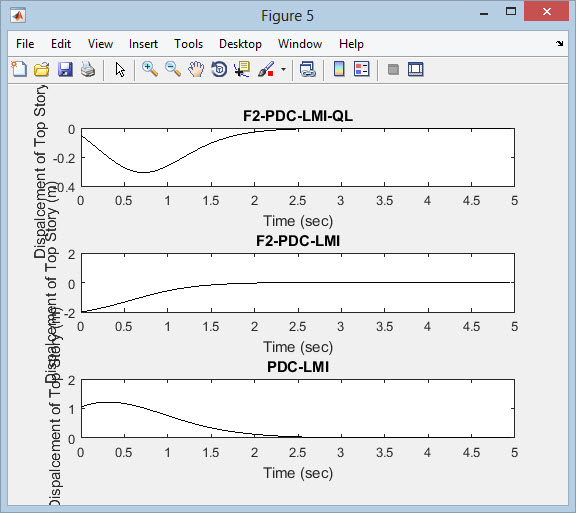
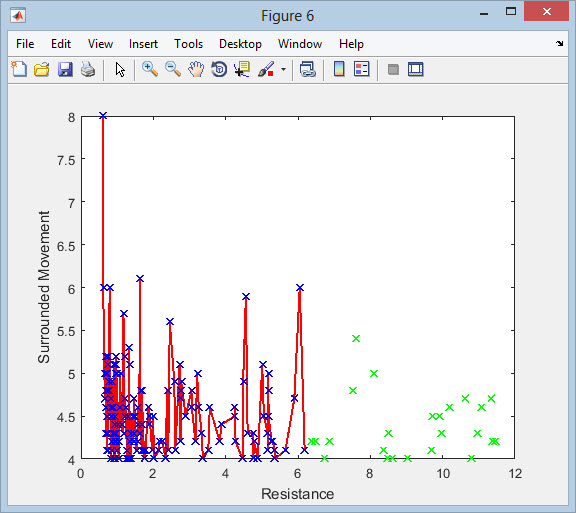
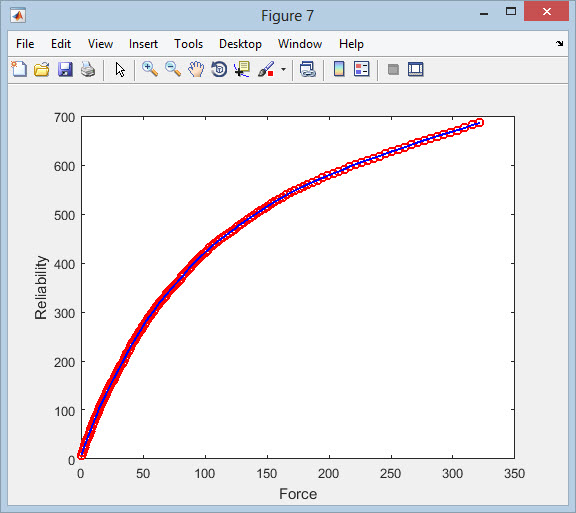
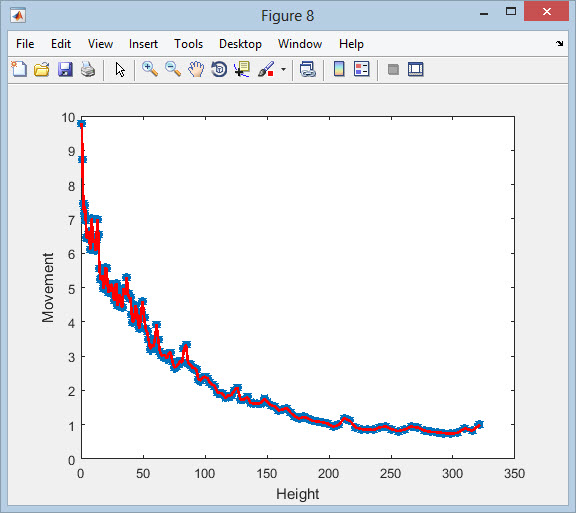
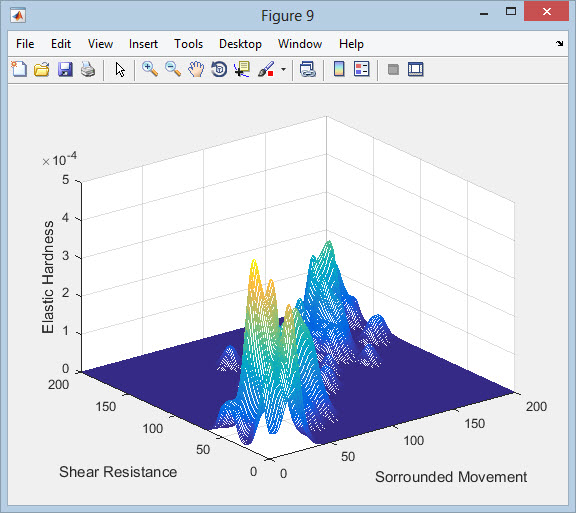
عكس خروجی برنامه
عکس 1
عکس 2
عکس 3
عکس 4
عکس 5
عکس 6
عکس 7
عکس 8
عکس 9
برای خرید این پروژه با شماره 09360703858
یا آدرس ایمیل nn4e@aol.com در تماس باشید.